×
复制成功
微信号:13061644116
添加微信好友,了解更多产品详情。
2025-12-05 18:10:56

一、研究背景
智能材料作为未来科技的关键组成部分,在许多领域中展现了巨大的应用潜力。然而,传统的磁响应材料通常受到固定磁各向异性和单一响应模式的限制,难以满足复杂环境和多功能任务的需求。例如,在医疗手术中,微型软体机器人需要在狭窄空间中变形以适应复杂的解剖结构,同时还需承担精准递送药物等多种功能。现有磁响应材料的局限性使得这些需求难以全面实现,因此开发具有可编程性和多响应能力的新型磁性材料成为研究热点。此外,如何通过简单、高效的技术在不破坏材料整体结构的情况下,实现多次重复编程,仍是当前智能材料研究中面临的重大挑战。以医疗手术为例,微创软体机器人要求材料在狭小空间中进行实时变形,而现有材料无法提供快速的响应速度和高精度的形状控制能力。因此,亟需一种能够实现多功能响应与编程的材料系统,以满足复杂应用场景的需求。
二、创新研究
中国科学技术大学微纳米工程实验室李家文副教授课题组提出了一种基于磁畴可重编码的形状记忆复合材料(RM-SMC)的磁性机器人系统,通过激光与磁场的协同作用,解决了传统磁性软机器人变形能力受限、承载能力较弱的问题。课题组通过结合形状记忆聚合物的可变刚度与磁性微囊的可重编码特性,设计了一种新型磁性机器人。该机器人能够在磁场和激光的共同作用下,进行磁畴图案化重编码,实现形态可重构和刚度可调,进而突破了现有磁性软机器人在形态改变和负载能力方面的瓶颈。
如图1所示,研究过程中使用近红外激光精确调控RM-SMC薄膜内部的磁性微囊,通过激光加热至微囊的相变温度,激活材料内部的磁性颗粒并使其在外部磁场的引导下重新排列,从而实现磁畴重编码。这一过程确保了即使撤去外部磁场,材料的磁畴编码仍能保持稳定,从而保证机器人在不同的磁场作用下能够实现预设的变形。此外,RM-SMC材料的形状记忆特性使得机器人能够在加热软化后发生复杂的三维变形,并在冷却后锁定其形状,从而具备形态保持能力。
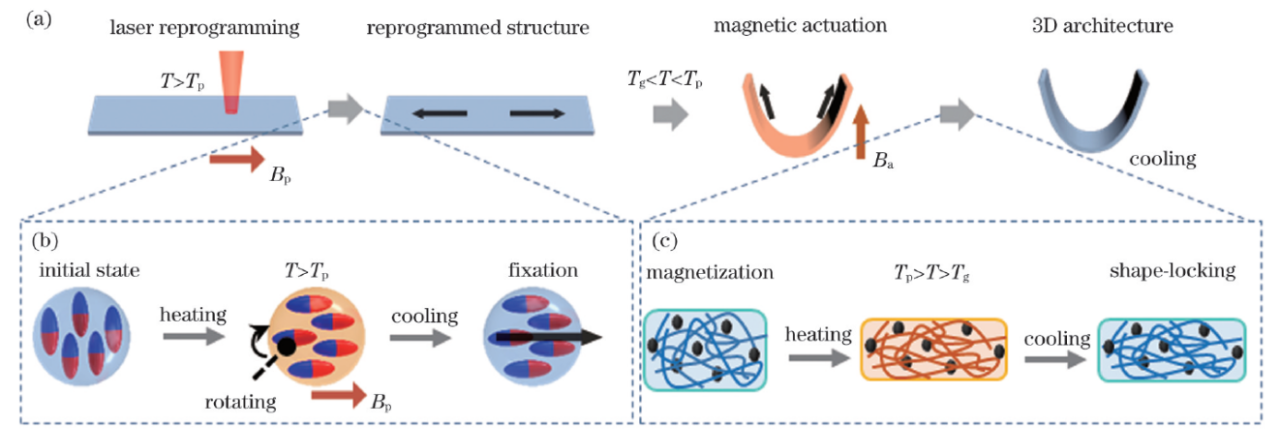
图1 RM-SMC机器人磁畴重编码及变形原理。(a)RM-SMC机器人重编码、加热变软、磁致变形和形状保持过程;(b)磁性微囊中磁性颗粒偏转示意图;(c)机器人基质变形、形状锁定示意图。Bp:旋转磁场;Ba:旋转磁场
通过精细编码的磁畴方向控制,机器人能够在磁场作用下完成多种形态转换。如图2所示,在二维长条结构的基础上,激光加热使得结构能够转变为圆筒形,并在旋转磁场的驱动下沿水平方向自由滚动。进一步的实验表明,机器人能够在不同地形上运动,如在纸面上滚动、攀爬斜坡、跨越狭缝等,还能在变化的磁场下保持稳定的形态。此外,如图3所示,机器人具备优异的负载能力,能够承载比自身重143倍的物体,完成货物搬运等复杂任务。
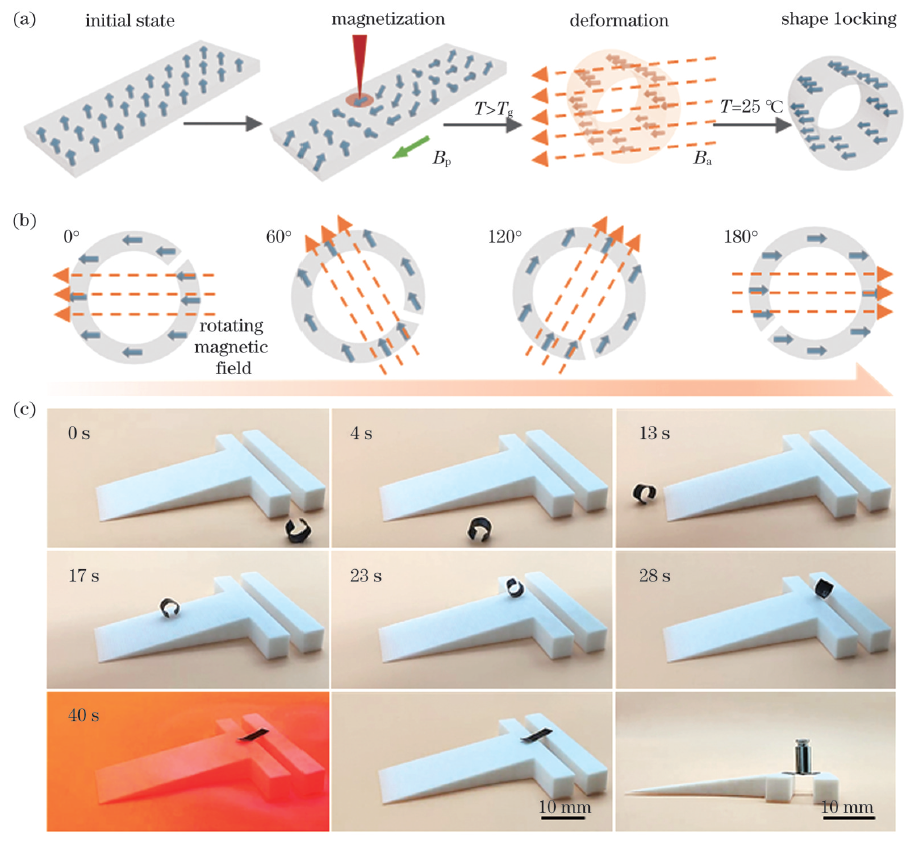
图2 滚动机器人。(a)滚动机器人的编码、变形、形状锁定过程;(b)机器人在旋转磁场下滚动过程;(c)机器人在不同地形运动以及变形后承载过程
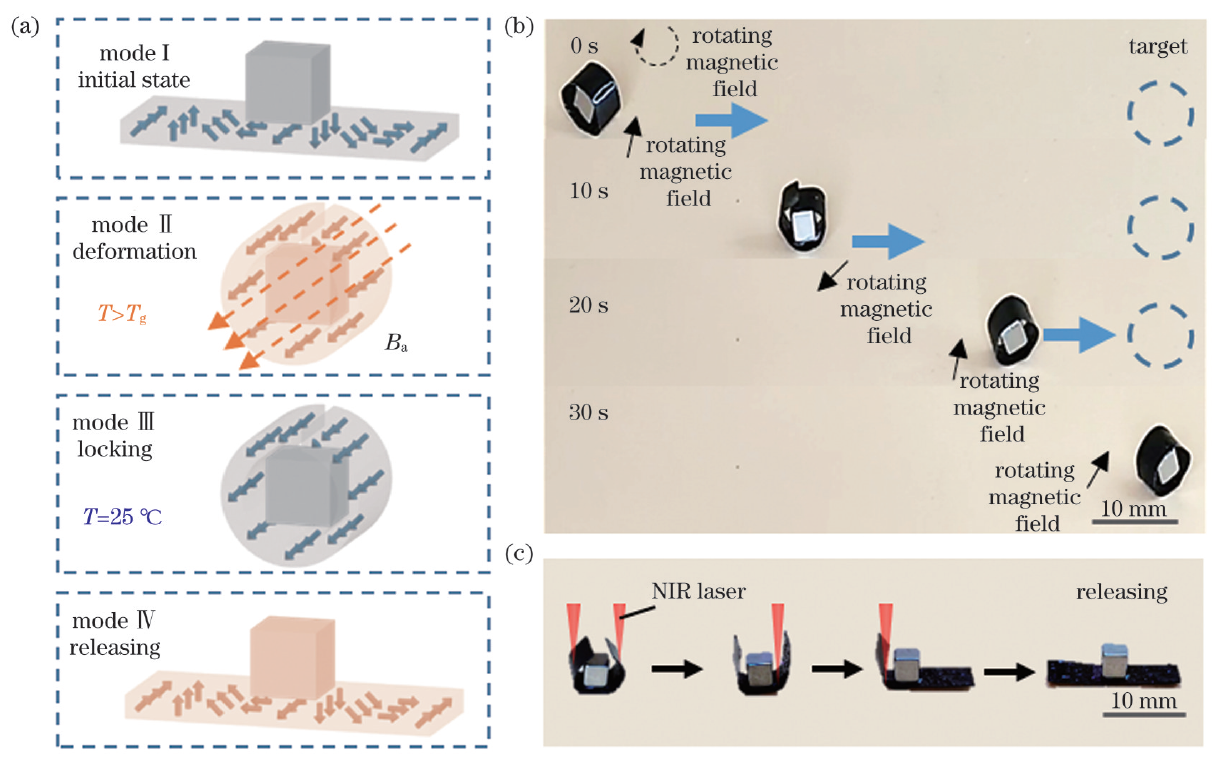
图3 载物机器人。(a)载物机器人的货物放置、磁驱变形、货物锁定和货物释放过程;(b)载物机器人在旋转磁场下的定向运输过程;(c)载物机器人货物的释放过程
同时,在RM-SMC长条变形时、通过改变外部磁场的方向,可以得到螺旋形状的机器人,可在旋转磁场驱动下螺旋前进。如图4所示,将RM-SMC螺旋机器人放置在装满水的液槽中进行驱动,在10 Hz的旋转磁场的驱动下,机器人的运动速度可达8.33 mm/s。
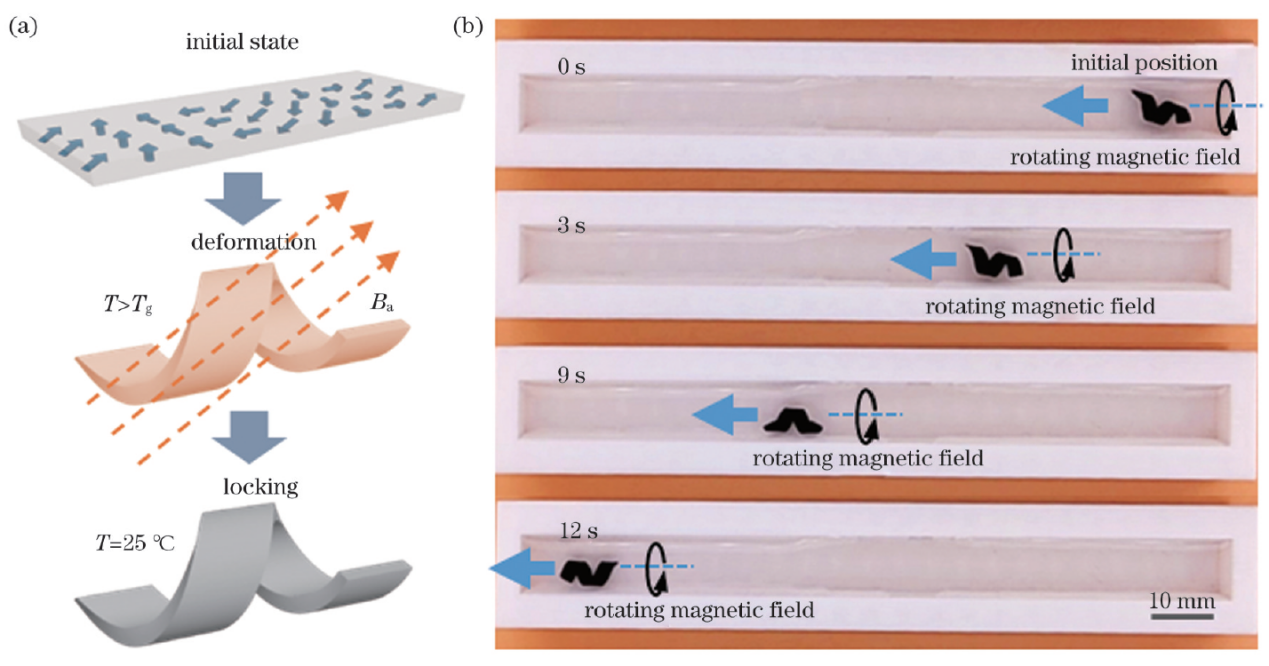
图4 螺旋机器人。(a)螺旋机器人的加热磁致变形和形状锁定过程;(b)螺旋机器人在旋转磁场下在水中驱动过程
三、总结
课题组实现了磁性材料在激光和磁场双重作用下的精确磁畴重编码与形态变形,不仅解决了现有磁性软机器人形变后无法保持形状的问题,还通过调节材料刚度,扩展了机器人在不同环境下的适用性。通过采用这种方法,机器人能够在多种复杂环境中实现自主运动、形态变换与任务执行,具备广泛的应用潜力。这项工作为软机器人领域提供了一种新的设计思路,不仅能显著提高机器人的形态变换能力和承载能力,还为未来生物医学、微纳操作、货物运输等领域的应用奠定了基础。通过进一步优化材料与工艺,该研究有望推动更多高性能自适应机器人系统的开发,并为智能机器人在复杂、动态环境中的广泛应用提供技术支持。
参考文献: 中国光学期刊网

您好,可以免费咨询技术客服[Daisy]
欢迎大家给我们留言,私信我们会详细解答,分享产品链接给您。
免责声明:
资讯内容来源于互联网,不代表本网站及新媒体平台赞同其观点和对其真实性负责。如对文、图等版权问题存在异议的,请联系我们将协调给予删除处理。行业资讯仅供参考,不存在竞争的经济利益。


